
 Beynimiz dış dünyayı anlamlandırırken, bilgisayarların nizamlı yapısının bilakis, adeta bir havai fişek gösterisi üzere ‘kaotik’ elektrik patlamalarından yararlanır. Çin merkezli bir araştırma takımı, insan hudut sistemindeki bu prensiplerden ilham alarak robotlar için acı ve yaralanma algısına sahip ‘NRE-skin’ isminde nöromorfik elektronik deri geliştirdi.
Beynimiz dış dünyayı anlamlandırırken, bilgisayarların nizamlı yapısının bilakis, adeta bir havai fişek gösterisi üzere ‘kaotik’ elektrik patlamalarından yararlanır. Çin merkezli bir araştırma takımı, insan hudut sistemindeki bu prensiplerden ilham alarak robotlar için acı ve yaralanma algısına sahip ‘NRE-skin’ isminde nöromorfik elektronik deri geliştirdi. Sistem, biyolojik hudut ağlarının çalışma mantığını birebir kopyalamaktan çok bu düzeneklerden esinlenerek tasarlandı ve bilhassa güç verimliliği yüksek yapay zeka donanımlarıyla uyumlu çalışacak formda kurgulandı.
Basınç ve pozisyon tespiti birebir sistemde
Geliştirilen yapay deri, bir robot elini kaplayacak formda tasarlanan esnek bir polimer katman üzerine inşa edildi. Bu tabakanın içine yerleştirilen basınç sensörleri, iletken polimerler aracılığıyla sisteme bağlandı. Araştırmacılar, algılamayı şimdilik sadece basınçla sınırlandırsa da, insan derisindeki hudut sistemine benzeri biçimde uyaranın şiddetini, pozisyonunu ve potansiyel hasarı birebir anda değerlendirebilen çok katmanlı bir yapı oluşturdu.
Sensörlerden gelen analog basınç dataları, sistemin bir sonraki katmanında insanlardaki üzere kısa elektrik darbelerinden oluşan “spike” sinyallerine dönüştürülüyor. Bu sinyaller bilgiyi darbenin hali, genliği, mühleti ve frekansı olmak üzere dört farklı formda taşıyabiliyor. Biyolojik sistemlerde olduğu üzere bu yapay deride de basıncın şiddeti spike frekansı ile kodlanıyor. Öbür özellikler ise adeta bir barkod üzere kullanılarak sinyalin hangi sensörden geldiğini tanımlıyor.
Sistem sadece basıncı algılamakla kalmıyor, birebir vakitte sensörlerin çalışır durumda olup olmadığını da denetliyor. Her sensör, tertipli aralıklarla “buradayım” manasına gelen bir sinyal gönderiyor. Bu sinyalin kesilmesi, ilgili sensörde bir arıza ya da hasar olduğuna işaret ediyor.
Robotlar refleks reaksiyonlar verebilecek
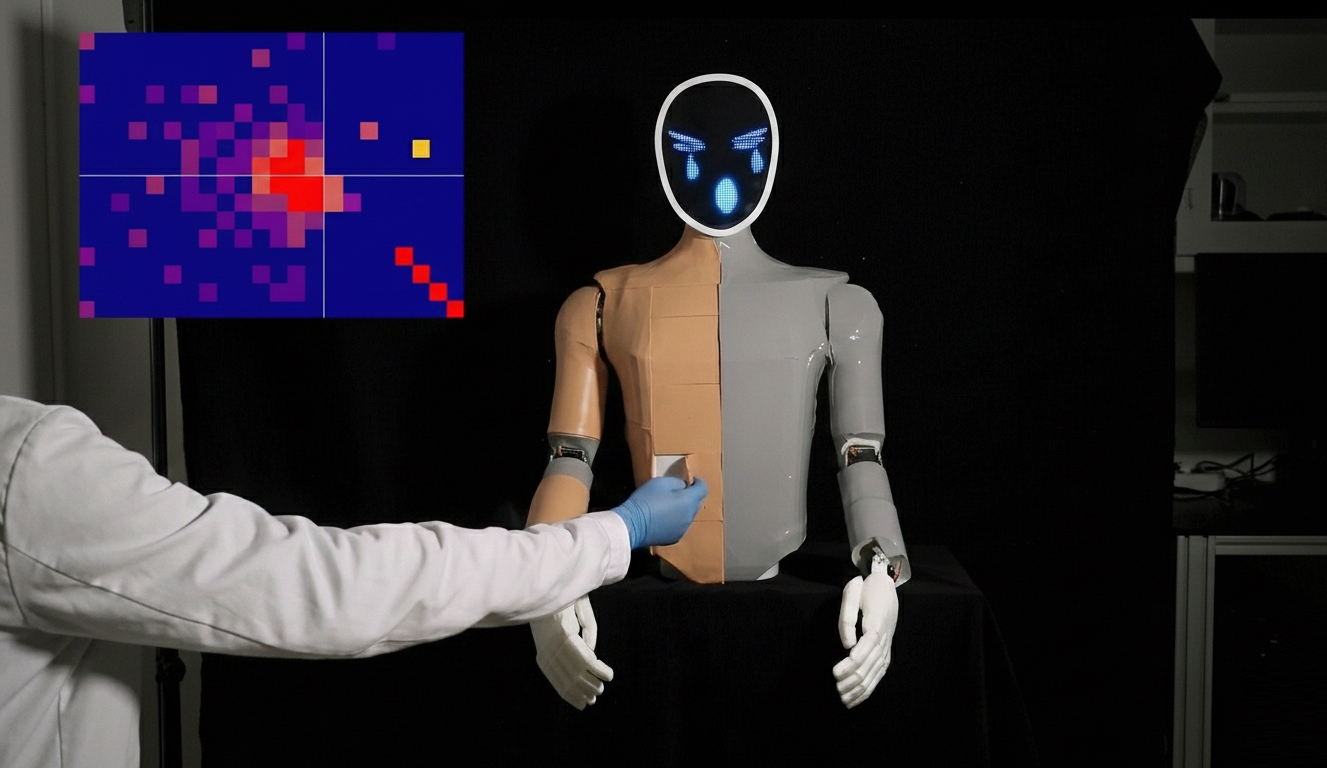
Spike sinyallerinin işlendiği ikinci katman, gelen dataları biriktirerek evvelden tanımlanmış bir acı eşiği ile karşılaştırıyor. Bu eşik aşıldığında, sistem otomatik olarak bir “acı sinyali” üretiyor. Böylelikle üst düzey denetim üniteleri devreye girmeden refleks gibisi reaksiyonlar tetiklenebiliyor. Araştırmacılar, bu yapay deriyle kaplanmış bir robot kolun, ziyan verici seviyede basınca maruz kaldığında otomatik olarak geri çekilmesini sağlamayı başardı. Deneylerde, robot kolun maruz kaldığı basınca bağlı olarak robotik bir yüzün mimik değiştirdiği de gösterildi.
Araştırma grubu, sistemin pratik kullanımını kolaylaştırmak için modüler deri tasarımını benimsedi. Elektronik deri, mıknatıslı kilitlerle birbirine tutunan segmentlerden oluşuyor. Bu segmentler, hem gerekli elektrik irtibatlarını otomatik olarak kuruyor hem de her biri kendine mahsus bir kimlik kodu yayımlıyor. Böylelikle hasar tespit edildiğinde, arızalı kesim kolay kolay çıkarılıp yenisiyle değiştirilebiliyor.
Araştırmacılar bu sistemi “nöromorfik robotik e-deri” (NRE-skin) olarak isimlendiriyor. Lakin burada kullanılan nöromorfik yaklaşım, hudut sisteminin birebir bir modeli olmaktan çok, onun çalışma mantığından esinlenen daha kolay bir tanıma dayanıyor. Örneğin, biyolojik hudut sistemi beden üzerinde direkt bir pozisyon haritası kullanırken, NRE-skin pozisyon bilgisini spike sinyallerinin özelliklerine kodluyor. Bu istikametiyle sistem, biyolojiden ilham alsa da biyolojik süreçlerin direkt bir kopyası değil.
Mevcut haliyle NRE-skin sırf basınç algılayabiliyor. Meğer gerçek insan derisi sıcaklık, soğuk, kimyasal tahriş ve daha birçok farklı uyaranı eş vakitli işleyebiliyor. Bu tıp algıların eklenmesi teorik olarak mümkün olsa da sinyallerin birbirine karışmaması için paralel süreç katmanları gerekecek.



Bir yanıt yazın